Гидронавтика
Учебно - научный молодежный центр
Учебно — научный молодежный центр (УНМЦ) «Гидронавтика» был создан в декабре 2010 г. профессором кафедры СМ11 «Подводные роботы и аппараты» Станиславом Павловичем Северовым для внедрения в учебный процесс учебный процесс проектно — конкурентного подхода к инженерному образованию. Основной деятельностью УНМЦ является разработка студенческими инженерными коллективами телеуправляемых необитаемых подводных аппаратов (ТНПА).
ТНПА представляет собой роботизированную подвижную платформу, обеспечивающую возможность маневрирования в толще воды, и несущую навесное инструментальное и измерительное оборудование. ТНПА связан с оператором или группой операторов, находящихся на поверхности, с помощью кабель — троса, через который на аппарат поступают сигналы управления и электропитание, а обратно передаются показания датчиков и видеосигналы.
Основная задача УНМЦ состоит в том, чтобы в течение одного учебного года сформировать команду студентов, которая должна разработать подводный телеуправляемый аппарат, предназначенный для участия в международных соревнованиях Marine Advanced Technology Education (MATE) www.marinetech.org.
 Лаборатория № 21 УНМЦ «Гидронавтика», корпус факультета «Специальное машиностроение»
Лаборатория № 21 УНМЦ «Гидронавтика», корпус факультета «Специальное машиностроение»
Соревнования МАТЕС являются не техноспортивной игровой самоцелью, а средством образовательной технологии для подготовки специалистов — профессионалов в области морской индустрии, поэтому них принимают участие команды ведущих университетов мира, готовящих инженеров в области робототехники. В рамках соревнования участники обмениваются опытом и демонстрируют свои разработки будущим коллегам со всего мира (в 2017 году на соревнованиях было 65 команд из 25 стран мира).
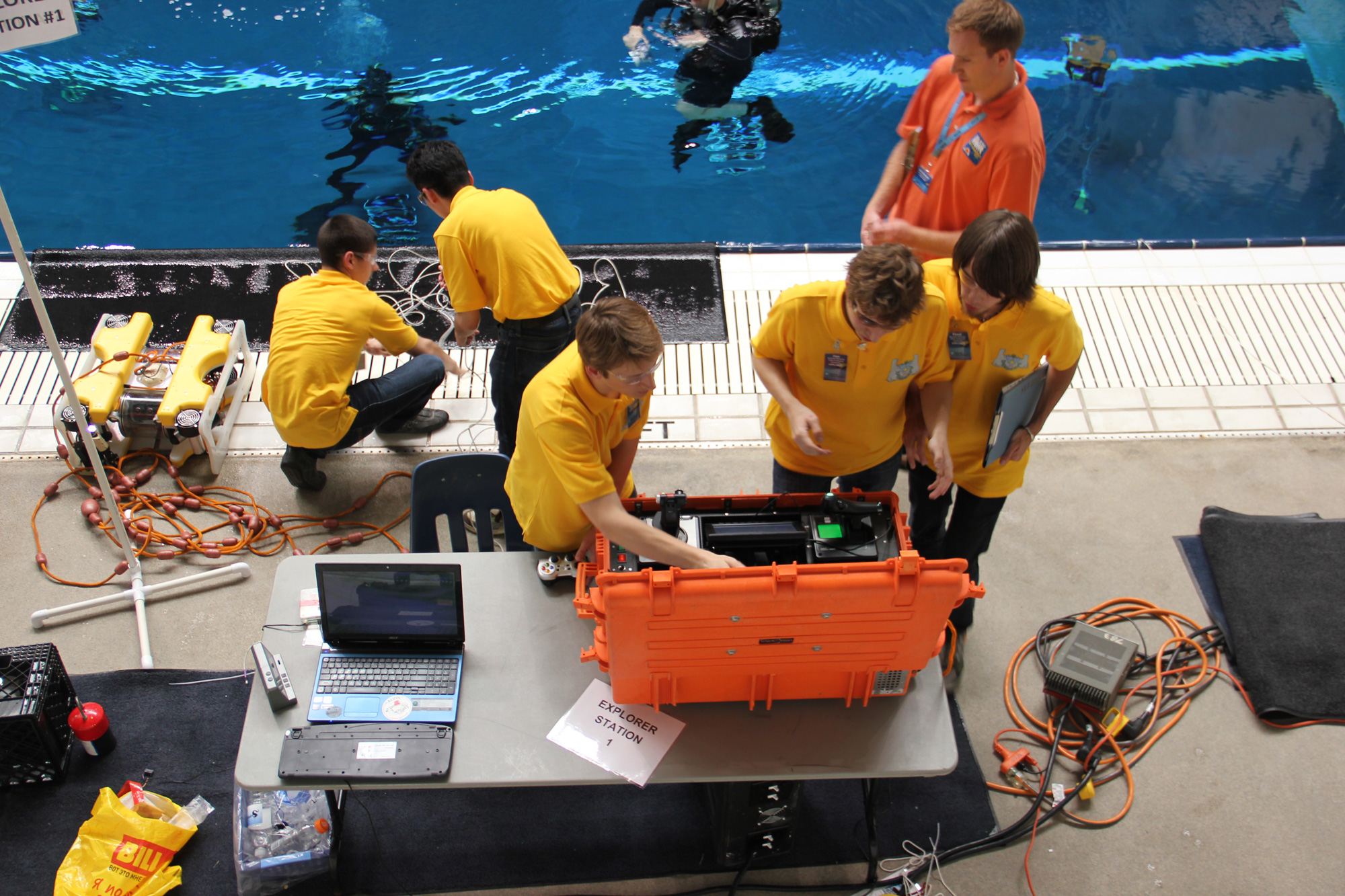 Подготовка к выступлению на MATEC 2013 (Лаборатория нейтральной плавучести NASA)
Подготовка к выступлению на MATEC 2013 (Лаборатория нейтральной плавучести NASA)
На соревнованиях MATE студенческий ТНПА выполняет работы, аналогичные тем, для которых используется профессиональная техника — поисковые и спасательные операции, остропка и извлечение крупных предметов со дна, работы по техническому обслуживанию объектов нефтегазового комплекса, операции по разминированию, поддержка водолазных работ и др. Круг решаемых задач постоянно расширяется, и под каждую новую задачу необходима разработка аппарата с соответствующими функциями.
 Выполнение ТНПА «Кусто» миссии по обслуживания водного шоу для соревнований MATEC 2017
Выполнение ТНПА «Кусто» миссии по обслуживания водного шоу для соревнований MATEC 2017
Первые соревнования, в которых приняла участие команда УНМЦ «Гидронавтика», прошли в 2010 году на Гавайях. За полгода была спроектирована и собрана первая разработка центра — подводный аппарат «Акватор», предназначенный для диагностики состояния донной вулканологической станции Гавайского архипелага.
В 2011 году соревнования проводились в лаборатории нейтральной плавучести NASA, Хьюстон, где на жюри был представлен новый аппарат «Акватор 2». Данная модель была разработана для ликвидации последствий взрыва и разрушения морской буровой платформы BP Deepwater Horison в Мексиканском заливе. Команда заняла почетное 10 место.
 Основатель УНМЦ «Гидронавтика» — Северов Станислав Павлович с подводными аппаратами «Акватор» (слева) и «Акватор 2» (справа)
Основатель УНМЦ «Гидронавтика» — Северов Станислав Павлович с подводными аппаратами «Акватор» (слева) и «Акватор 2» (справа)
В 2012 г. Мировой чемпионат по подводной робототехнике прошел в Aquatic Center, Орландо. Из 572 команд в финал соревнований прошли только 52. В их числе, по общему рейтингу результатов, на 7-м месте команда «Гидронавтика» МГТУ с аппаратом «Акватор 2D».
В 2013 году на соревнованиях MАТЕС команда УНМЦ в г. Хьюстон (США) представила новую разработку — ТНПА «Акватор 3D» и получила ряд почетных наград за инновации (реализация системы 3D — зрения и 3-x степенной гидравлический манипулятор) и за лучшую конструкцию.
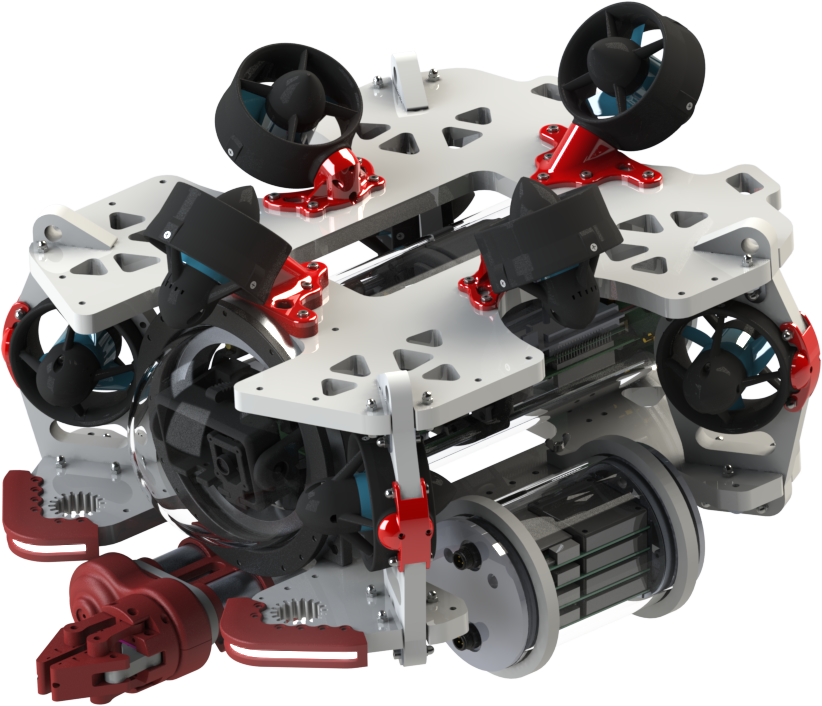
 3D модель ТНПА «Акватор 3D» с 3-х степенным гидравлическим манипулятором и системой 3D зрения
3D модель ТНПА «Акватор 3D» с 3-х степенным гидравлическим манипулятором и системой 3D зрения
В 2014 году, когда команда МГТУ им. Н. Э. Баумана заняла на МАТЕС второе место, был разработан телеуправляемый подводный аппарат Jellyfish. Он включил в себя достоинства предыдущих трех аппаратов, разработанных в центре, стал более легким, маневренным. В нем были учтены и исправлены ошибки прошлых лет. Все это позволило добиться высоких результатов в выполнении миссий на соревнованиях того года и послужило катализатором дальнейшего развития «Гидронавтики».
 Награды УНМЦ «Гидронавтика»
Награды УНМЦ «Гидронавтика»
В 2015 году команда УНМЦ принялась за разработку экспериментального аппарата «Iceberg», включающего ряд концептуальных изменений и технических улучшений относительно предыдущих разработок. Несмотря на то, что не все технические решения, заложенные в проект ТНПА «Iceberg» удалось воплотить, команда УНМЦ «Гидронавтика» в 2016 году приняла участие в международных соревнованиях MATEC, где выступила с данным аппаратом в лаборатории нейтральной плавучести НАСА в г. Хьюстон.
 Студенческая команда УНМЦ «Гидронавтика» на ежегодных соревнованиях подводных аппаратов «MATEC-2017» в г. Лонг Бич, США
Студенческая команда УНМЦ «Гидронавтика» на ежегодных соревнованиях подводных аппаратов «MATEC-2017» в г. Лонг Бич, США
Помимо участия в MATE, центр «Гидронавтика» является лауреатом и победителем различных студенческих конкурсов, смотров и выставок. На соревнованиях BlackSea ROV в г. Констанца (Румыния) в 2013 году команда УНМЦ заняла 1-е место в общем зачете. На этих соревнованиях аппараты команд — участников выполняли задания в море.
В настоящее время команда УНМЦ «Гидронавтика» занята разработкой ТНПА «Кусто», который будет сочетать в себе характеристики телеуправляемого и автономного аппарата, для участия в будущем в таких соревнованиях как RoboSub (США) и SAUVC (Сингапур), где поставленные задачи должны выполняться без управления пилота, самим подводным аппаратом.
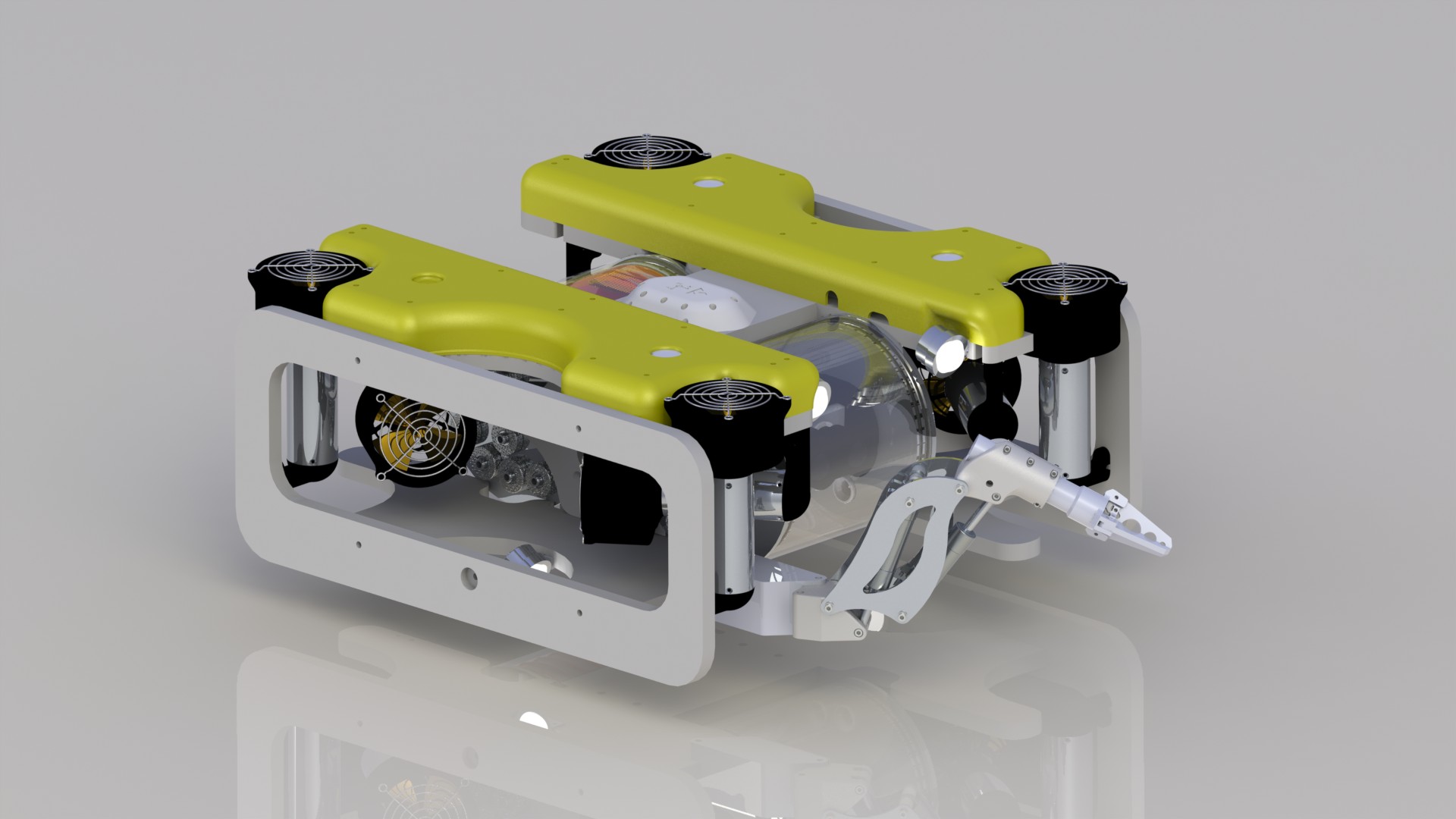
 3D модель подводного аппарата «Кусто»
3D модель подводного аппарата «Кусто»
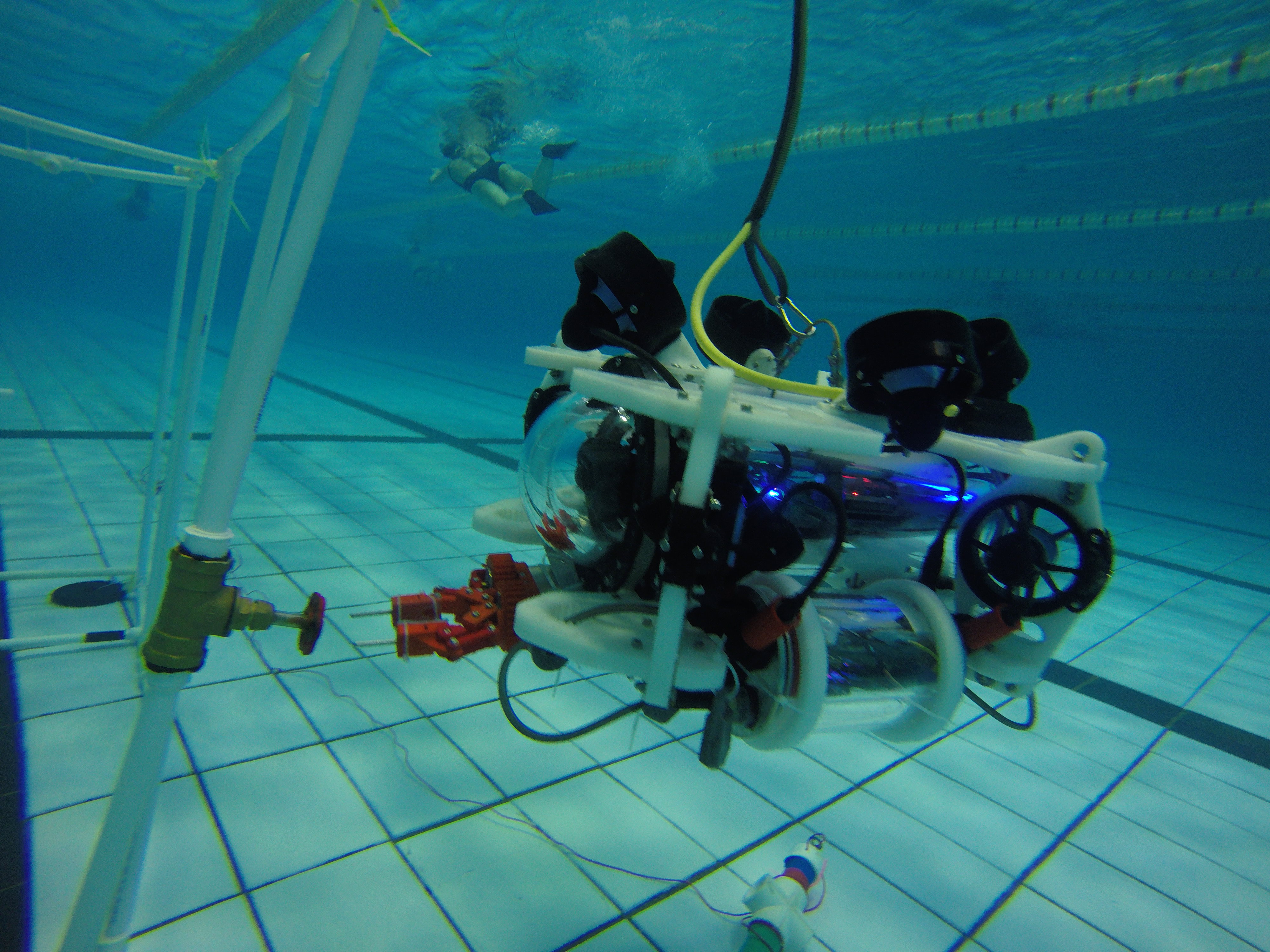
 Тестирование ТНПА «Кусто» в бассейне спортивного комплекса МГТУ им. Н.Э. Баумана
Тестирование ТНПА «Кусто» в бассейне спортивного комплекса МГТУ им. Н.Э. Баумана
За время существования УНМЦ «Гидронавтика» инженерами центра был разработан ряд прототипов подводных телеуправляемых аппаратов и их узлов. С каждым годом темпы развития морской индустрии и подводной робототехники возрастают и к студенческим конкурсным аппаратам предъявляются всё более высокие требования. Чтобы соответствовать этим требованиям и создавать аппараты, эффективно выполняющие поставленные задачи, команда центра активно использует для своих разработок различные САПР пакеты и 3D прототипирование. Для проведения испытаний лаборатория располагает собственным бассейном глубиной 2 м.
На данный момент руководителем УНМЦ «Гидронавтика» является Вельтищев Вадим Викторович — доктор технических наук, заведующий кафедрой «Подводные роботы и аппараты» МГТУ им. Н. Э. Баумана, заведующий отделом «Подводные системы» НИИСМ МГТУ им. Н. Э. Баумана. Автор более 70 научных работ, авторских свидетельств и патентов на изобретение в области создания подводных робототехнических комплексов, разработки средств движения и других исполнительных систем для необитаемых и обитаемых подводных средств.
Многие члены студенческих команд УНМЦ «Гидронавтика» работают по специальности, а некоторые из них даже проектируют собственные аппараты. Также УНМЦ «Гидронавтика» сотрудничает с компаниями-производителями подводной техники, такими как: Тетис Про, HYDROBOT-X, ROVBUILDER, ООО «Подводная робототехника» и другие.
 Капитаны команд УНМЦ «Гидронавтика» (справа — Костанди Илья, по центру — Дмитрий Гарбузов) — разработчики ТНПА «Марлин-350»
Капитаны команд УНМЦ «Гидронавтика» (справа — Костанди Илья, по центру — Дмитрий Гарбузов) — разработчики ТНПА «Марлин-350»
С нами можно связаться через группу Вконтакте: https://vk.com/hydronautics
Электронная почта: hydronautics-team@yandex.ru
Сайт НУК СМ
Данный сайт является официальным источником информации о факультете «Специальное машиностроение» МГТУ им. Н.Э. Баумана.
 Сайт МГТУ им. Н.Э.Баумана
Сайт МГТУ им. Н.Э.Баумана
Содержание
Контакты
Госпитальный пер, 10
Москва, 105005
+7 (499) 263-65-67
+7 (499) 263-65-12