Новости факультета
Подводные роботы для решения актуальных задач в море
22 июля 2020 г.
Мехатроника – сложное слово и интересная специальность, эту дисциплину порой называют «наукой обо всем» – настолько велика сфера её использования. В частности, ее сочетание с робототехникой позволяет создавать уникальные подводные аппараты. Этим давно и успешно занимаются на кафедре СМ-11 МГТУ им. Н.Э. Баумана – «Подводные аппараты и роботы».
– Один из очень интересных проектов, над которыми мы работаем – подводный «трактор» для укладки кабеля в дне Ледовитого океана. Именно «в», а не «на». Никогда прежде такой техники в России не было: клали кабель на дно и ремонтировали, когда он рвался, – рассказывает заведующий кафедрой СМ-11 профессор Вадим Вельтищев. – Если грунт мягкий, то наш аппарат отсасывает песок и, в результате, образуется траншея. Если же грунт каменистый, то траншею «роет» пила. Кабель находится в «лапах» робота, чтобы пила его не повредила, и плавно опускается в траншею позади аппарата.
Не менее увлекательная задача – обследование судов ниже ватерлинии непосредственно на плаву. Сейчас эту работу выполняют водолазы. Они буквально «облепляют» днище и осматривают его: нет ли деформаций, сколов, трещин. Ученые Университета предложили сделать этот процесс дистанционным и автоматизированным.
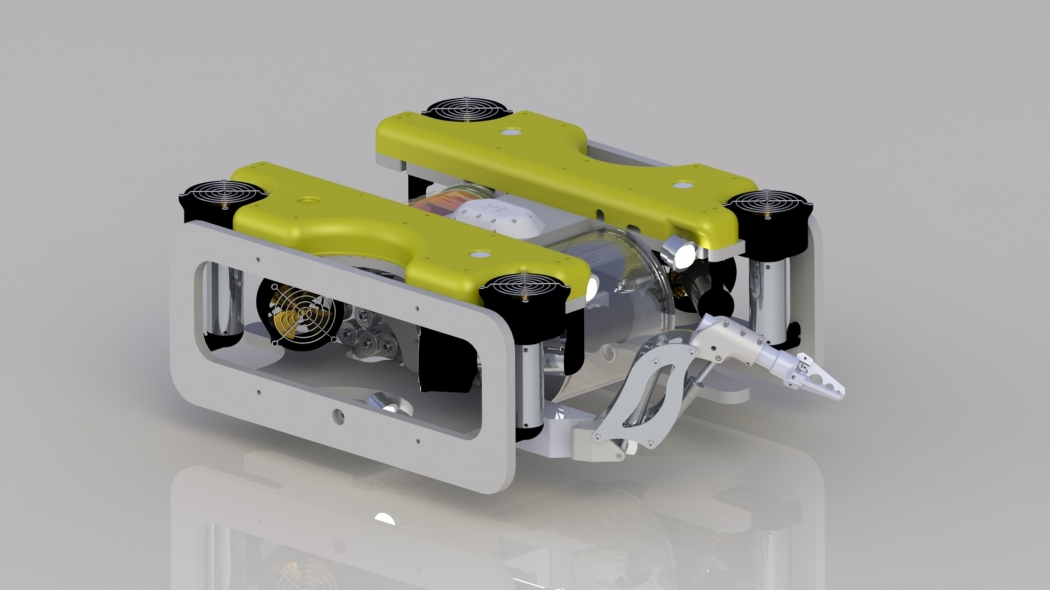
– Мы доказали, что роботизация этой операции возможна, и уже получили весьма обнадеживающие результаты, – говорит Вадим Вельтищев. – Действующий образец состоит из двух главных блоков: телеуправляемого подводного робота и акустической навигационной системы. Восемь винтомоторных двигателей обеспечивают прижим к кораблю, а привода колес перемещают робот по днищу судна. При помощи тех же винтов робот может и плыть. Управлять аппаратом можно в автоматизированном режиме, а можно и в ручном. Чтобы оператор мог видеть происходящее, предусмотрены три телевизионные камеры, есть подсветка.
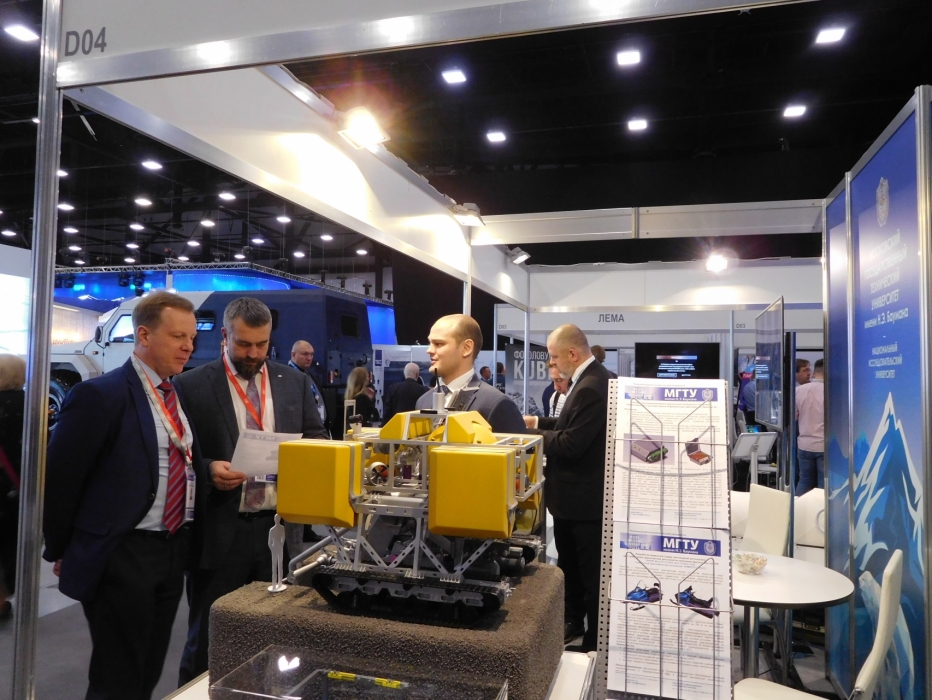
Студенты кафедры СМ-11 не стоят в сторонке от интересных дел, дожидаясь получения диплома. Энтузиасты объединились в Учебно-научный молодежный центр (УНМЦ) «Гидронавтика» и создают собственные подводные аппараты.
– Проект создания своего подводного робота захватил нас. Со временем не считались – засиживались до ночи. Легко вставать на первые пары, когда на них рассказывают о системах, которые вы используете в своей работе. Мы многое делали своими руками, разбирались в базовых моментах подводной робототехники, учились работать в команде, – вспоминает преподаватель Екатерина Лямина.
С 2010 года студенты участвуют в международных соревнованиях по подводной робототехнике, где решают интересные, масштабные и актуальные задачи. Первые соревнования, в которых приняли участие «гидронавты», прошли в 2010 году на Гавайях. Там они представили подводный аппарат «Акватор», предназначенный для диагностики состояния донной вулканологической станции Гавайского архипелага.
В 2011 году соревнования прошли в лаборатории нейтральной плавучести NASA в Хьюстоне, где был представлен аппарат «Акватор 2» для ликвидации последствий взрыва и разрушения морской буровой платформы BP Deepwater Horison в Мексиканском заливе.
Соревнований и призовых мест было очень много. Среди последних достижений бауманцев можно назвать:
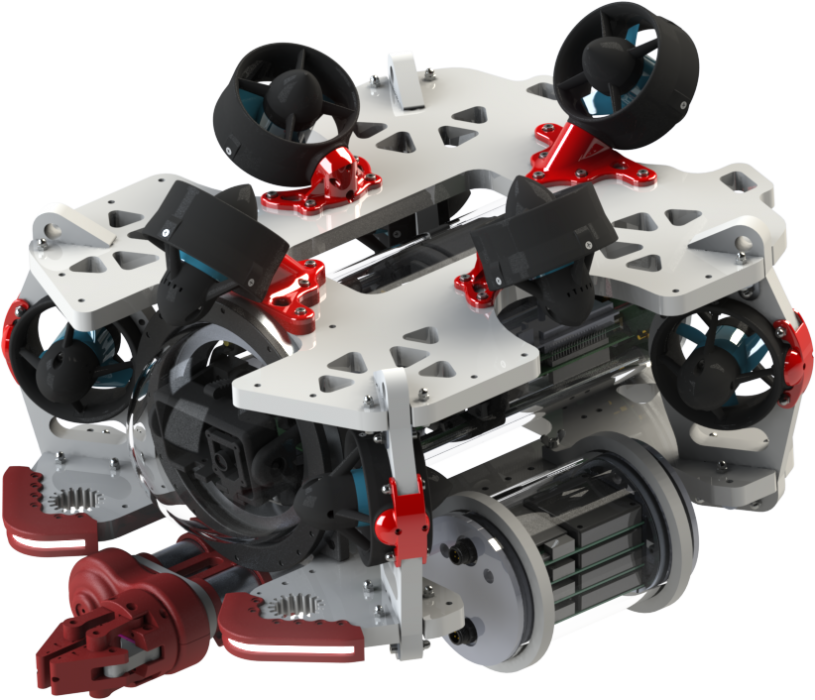
Автономный подводный аппарат «Кусто-3» использует сверхточную нейросеть для распознавания подводных объектов. Задача алгоритма заключалась в том, чтобы аппарат выполнил поиск подводного объекта в толще воды, вышел на этот объект и центрировался на него. Для обучения сети был составлен собственный датасет. В него вошло 3,6 тысяч изображений подводных объектов, отснятых в бассейне МГТУ. На каждом изображении эти объекты были отмечены. Было обучено и протестировано на реальных изображениях несколько архитектур нейросетей.
Алгоритм был испытан при различных вариантах расположения ворот относительно стартовой зоны. Во всех случаях центрирование выполнялось успешно. Стоит заметить, что внешний вид среды и объекта в симуляторе значительно отличаются от реальных изображений в обучающем наборе данных, однако нейросеть приемлемо работает даже в таких условиях.
Разработчик проекта - студент шестого курса факультета «Специальное машиностроение» Владислав Плотников. Система искусственного интеллекта успешно прошла проверку в ходе испытаний. Аппарат может использоваться на соревнованиях по подводной робототехнике, а также применяться при выполнении поисковых подводных работ.



Сайт НУК СМ
Данный сайт является официальным источником информации о факультете «Специальное машиностроение» МГТУ им. Н.Э. Баумана.
 Сайт МГТУ им. Н.Э.Баумана
Сайт МГТУ им. Н.Э.Баумана
Содержание
Контакты
Госпитальный пер, 10
Москва, 105005
+7 (499) 263-65-67
+7 (499) 263-65-12